I am an Electrical Engineering student with a passion for new technologies that impact our day-to-day lives. One
of my primary interests is in understanding and designing machine-to-human as well as machine-to-machine
interactions.
Program development is not just about writing code that works; it is also about writing code that is scalable,
efficient, and reusable.
I strongly believe that "good" code is code that is thoroughly abstracted and unit tested. Well-designed
abstraction allows us to decouple complex programs to smaller, simpler modules that are easier to build,
manage, and test. Encapsulated modules are also easier to reuse and improves programmers' efficiency.
Since I started coding, I have continually worked on improving abstraction in my programs. The
n-body simulation
project is one of my favourite works that shows a good level of abstraction.
Currently, I am working on developing my knowledge of threading in POSIX systems.
Intelligent Control Systems
Control Engineering is essential to almost everything we see: from simple elevators to SpaceX's rockets. It is
required to regulate the performance of systems, thus ensuring smooth operation.
I first became addicted to control engineering when I built a light-tracking arm in my sophomore year. Since
then, I have worked on a wide variety of projects, from UAVs to social robots.
Currently, I am focusing on active control: how systems perceive and respond to highly dynamic environments.
Cloud Infrastructure
At Mercedes-Benz Research and Development North America (MBRDNA) in Seattle, WA, I worked with a software
development team to build Azure-based cloud infrastructure that automates and manages remote application
deployment. This infrastructure would make it possible for remote updating of car software in the future.
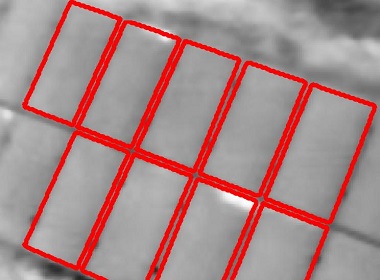
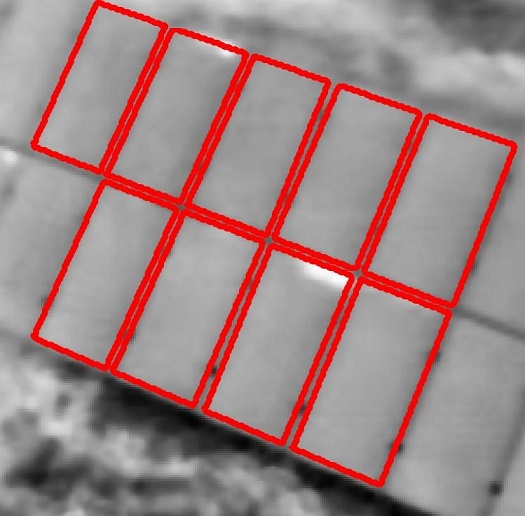
Thermal Imaging
Advanced Visual Analytics Asia (AVA Asia), an upcoming start-up in Singapore, aims to build surveillance
technologies for aerial inspection of large solar farms. To achieve this, the team makes use of DJI UAVs
mounted with FLIR Thermal Imaging Cameras.
Faulty solar cells are known to have an abnormal thermal signature; they are often hotter than their
neighbours. Hence, by analysing the thermal images of the panels, it would be possible to identify the
presence of such cells. As a software engineer with AVA, my primary task was to work on developing
edge-detection and localization algorithms to pin-point the location of defective cells to an accuracy of one
sqaure meter.
At I2R, I worked on building a social "teddy-bear" robot designed to interact with autistic children. The goal
was to understand the moods of the children, and allow the robot to respond in an appropriate manner. For
example, if the child was punching the robot, it would respond sadly, and if he/ she was stroking the robot,
it would be happy.
The actions themselves were designed after watching countless videos of pet animal behaviours, and the motion
was controlled by motors hooked up to an Arduino Mega board. To interpret the child's gestures, we placed
touch sensitive receptors below the skin of the bear and classified the sensor data using machine learning
models. Gestures were classified using the force of the touch (i.e. how hard or soft the touch was) as well as
the duration of the touch.
The video above shows one of our very early prototypes that made use of an off-the-shelf teddy-bear skin.
Subsequent models were designed with a custom skin. The bear is currently being beta-tested with different
child care centers.
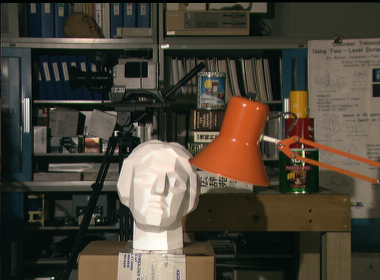
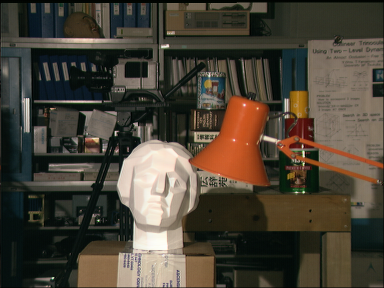
Stereo Vision
I worked at Prof. Silvia Ferrari's
Laboratory for Intelligent Systems and Controls (LISC)
at Cornell University. My project explored the possibility of incorporating depth information for nonlinear
target-tracking based on Gaussian processes.
To put it simply, the goal was to model a mobile robot and teach it to track a highly erratic moving target.
In order to enhance the robot's tracking ability, we included depth information obtained through a virtual
stereo-camera.
During the project, I first modeled a mobile stereo-camera to generate depth maps based on
Hirschmuller's algorithm for Semiglobal Matching.
Currently, I am working on using the depth maps for egomotion estimation based on optical flow subtraction.
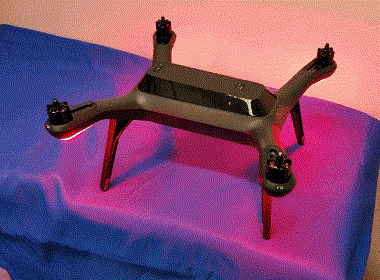
Technology is no longer a barrier for high-performance UAVs, and before long, we can expect to regularly see
UAVs zooming around to aid in rescue efforts, deliver goods, or run other errands. CalUnmanned aims to develop
an licensing and management program that would allow government agencies to monitor UAVs and differentiate
between civilian and suspicious vehicles.
The licensing system is composed of a two-part broadcasting mechanism: visible LEDs and radio messages. The
LEDs flash a unique sequence of colours corresponding to the UAV's ID (analogous to a car's license plate).
The radio message emits telemetry information, including the ID, information about the UAV's owner, its
destination etc.
During my attachment, I worked on developing the radio connections and designing the messages, based on the
ADS-B packetsof commerical flights. Our prototype was displayed at NASA's Unmanned Traffic Management (UTM)
Convention 2015!
To learn more about the future of Unmanned Traffic Management, visit NASA's page here.





Social Robot
At I2R, I worked on building a social "teddy-bear" robot designed to interact with autistic children. The goal was to understand the moods of the children, and allow the robot to respond in an appropriate manner. For example, if the child was punching the robot, it would respond sadly, and if he/ she was stroking the robot, it would be happy.
The actions themselves were designed after watching countless videos of pet animal behaviours, and the motion was controlled by motors hooked up to an Arduino Mega board. To interpret the child's gestures, we placed touch sensitive receptors below the skin of the bear and classified the sensor data using machine learning models. Gestures were classified using the force of the touch (i.e. how hard or soft the touch was) as well as the duration of the touch.
The video above shows one of our very early prototypes that made use of an off-the-shelf teddy-bear skin. Subsequent models were designed with a custom skin. The bear is currently being beta-tested with different child care centers.